首先谈到线程池,顾名思义我们需要预先建立多个线程,但是怎么去管理这些线程才是重点。下面的结构可以作为线程池的一个管理结构:
typedef struct {
pthread_cond_t ready_event;
pthread_mutex_t task_queue_lock;
Work_task *task_head;
pthread_t *threadid_link;
int max_thread_num;
int current_queue_size;
int destory_flag;
}Thread_pool;typedef struct work_queue{
void *(*task_process)(void *arg);
void *arg;
struct work_queue *next;
}Work_task;Task_process 是一个参数为arg的函数指针,next为链表的next域指针。
这样我们表示了一个线程池的管理结构,先面我们就需要去初始化这个线程池,开始我们定义一个全局的线程池结构的变量
Thread_pool *thread_pool=NULL;void Thread_pool_init(int max_thread_num){
int num;
thread_pool=(Thread_pool *)malloc(sizeof(Thread_pool));
pthread_mutex_init(&(thread_pool->task_queue_lock),NULL);
pthread_cond_init(&(thread_pool->ready_event),NULL);
thread_pool->task_head=NULL;
thread_pool->destory_flag=0;
thread_pool->max_thread_num=max_thread_num;
thread_pool->current_queue_size=0;
thread_pool->threadid_link=(pthread_t *)malloc(sizeof(pthread_t)*max_thread_num);
for(num=0;num<max_thread_num;num++){
pthread_create(&(thread_pool->threadid_link[num]),NULL,thread_routine,NULL);
}
}(*(work->task_process))(work->arg);void *thread_routine(void *arg){
printf("[ starting thread %lu ]\n",pthread_self());
while(1){
pthread_mutex_lock(&(thread_pool->task_queue_lock));
while(thread_pool->current_queue_size==0 && !thread_pool->destory_flag){
printf("[ task_queue is null ,thread %lu is waitting ! ]\n",pthread_self());
pthread_cond_wait(&(thread_pool->ready_event),&(thread_pool->task_queue_lock));
}
if(thread_pool->destory_flag){
pthread_mutex_unlock(&(thread_pool->task_queue_lock));
printf("[ thread %lu will got over now !]\n",pthread_self());
pthread_exit(NULL);
}
printf("[ thread %lu is starting work ]\n",pthread_self());
assert(thread_pool->current_queue_size!=0);
assert(thread_pool->task_head!=NULL);
thread_pool->current_queue_size--;
Work_task *work=thread_pool->task_head;
thread_pool->task_head=work->next;
pthread_mutex_unlock(&(thread_pool->task_queue_lock));
(*(work->task_process))(work->arg);
free(work);
work=NULL;
}
}在此,我们通过互斥锁的机制保证了线程的任务执行流程,现在我们关心的是既然线程需要执行任务,那么怎么向线程池中投放任务,即我们需要一个函数实现任务投放,我们可以声明一个函数:
Void Add_task_to_threadpool(void *(*task_process)(void *arg),void *arg);Void Add_task_to_threadpool(void *(*task_process)(void *arg),void *arg){
Work_task *new_work=(Work_task*)malloc(sizeof(Work_task));
new_work->next=NULL;
new_work->task_process=task_process;
new_work->arg=arg;
pthread_mutex_lock(&(thread_pool->task_queue_lock));
Work_task *work=thread_pool->task_head;
if(work!=NULL){
while(work->next!=NULL)
work=work->next;
work->next=new_work;
}else
thread_pool->task_head=new_work;
assert(thread_pool->task_head!=NULL);
thread_pool->current_queue_size++;
pthread_mutex_unlock(&(thread_pool->task_queue_lock));
pthread_cond_signal(&(thread_pool->ready_event));
}void *work_process(void *arg){
printf("[ threadid is %lu , working with taskid %d ]\n",pthread_self(),*(int *) arg);
sleep(2);
printf("[ workid %d over here with threadid %lu ]\n",*(int *) arg,pthread_self());
return NULL;
}在多个线程处理完大于线程数目的任务量时(一个线程一次处理一个任务),我们需要的就是资源的回收和善后操作,阻塞所有的线程,销毁线程池,销毁任务队列,销毁条件变量和互斥锁。
Void destory_thread_pool(){
int num;
thread_pool->destory_flag=1;
pthread_cond_broadcast(&(thread_pool->ready_event));
for(num=0;num<thread_pool->max_thread_num;num++)
pthread_join(thread_pool->threadid_link[num],NULL);
free(thread_pool->threadid_link);
Work_task *crew=NULL;
while(thread_pool->task_head!=NULL){
crew=thread_pool->task_head;
thread_pool->task_head=thread_pool->task_head->next;
free(crew);
}
pthread_mutex_destroy(&(thread_pool->task_queue_lock));
pthread_cond_destroy(&(thread_pool->ready_event));
free(thread_pool);
thread_pool=NULL;
return 0;
}在此我们一个线程池从开始创建到最后的销毁以及中间的管理和运行流程就是这样。我们用这样的main函数来测试我们的线程池:
int main(int argc, char *argv[])
{
int max_pthread_num=4;
int work_routine_num=10;
int tip;
int *worknumber=(int *)malloc(sizeof(int)*work_routine_num);
Thread_pool_init(max_pthread_num);
for(tip=0;tip<work_routine_num;tip++){
worknumber[tip]=tip;
Add_task_to_threadpool(work_process,&worknumber[tip]);
}
sleep(5);
destory_thread_pool();
free(worknumber);
return EXIT_SUCCESS;
}测试运行结果如下 :
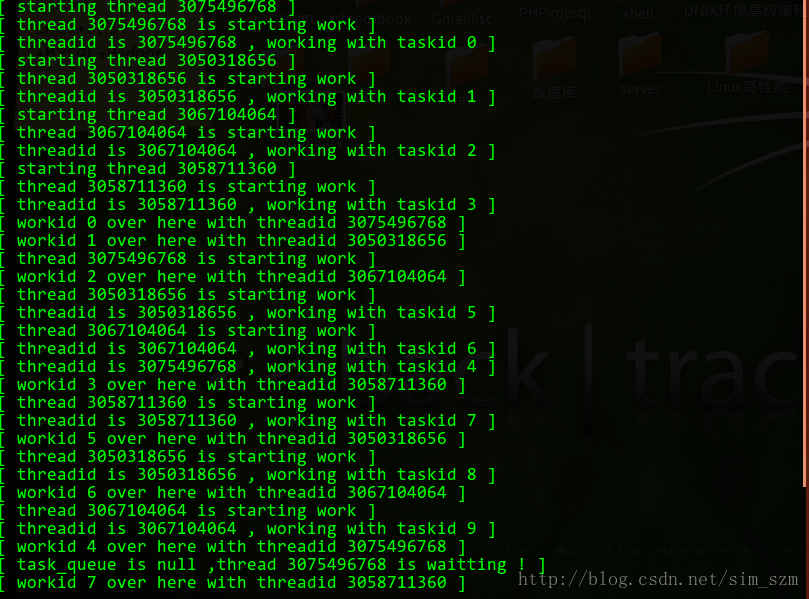

一个简单的通过条件变量与加锁机制的线程池管理和执行任务操作的过程就是这样。但是其中涉及到的东西其实还是蛮复杂的,我们通过投放任务再以条件变量的形式唤醒等待线程。包括这种线程池的管理结构其实都是挺不错的思想。不多说了,写到这手都酸了。Over !