概念
计算机硬件在快速发展,内存容量在逐渐增大,处理器的速度也在增加,外设 I/O 性能方面的进展不大。于是就想到,让应用在执行 I/O 操作或空闲时,可以主动 释放处理器 ,让其他应用继续执行。
在应用程序员的脑海里,整个计算机就应该是为他们自己的应用准备的,不用考虑其他程序的运行。这导致应用程序员在编写程序时,无法做到在程序的合适位置放置 放弃处理器的系统调用请求 ,这样系统的整体利用率还是无法提高。
所以,站在系统的层面,还是需要有一种办法能强制打断应用程序的执行。
把一个程序的一次完整执行过程称为一次 任务 (Task),把一个程序在一个时间片(Time Slice)上占用处理器执行的过程称为一个 任务片 (Task Slice)。操作系统对不同程序的执行过程中的 任务片 进行调度和管理,即通过平衡各个程序在整个时间段上的任务片数量,就能达到一定程度的系统公平和高效的系统效率。
总体结构
多道程序操作系统 - Multiprog OS的总体结构:
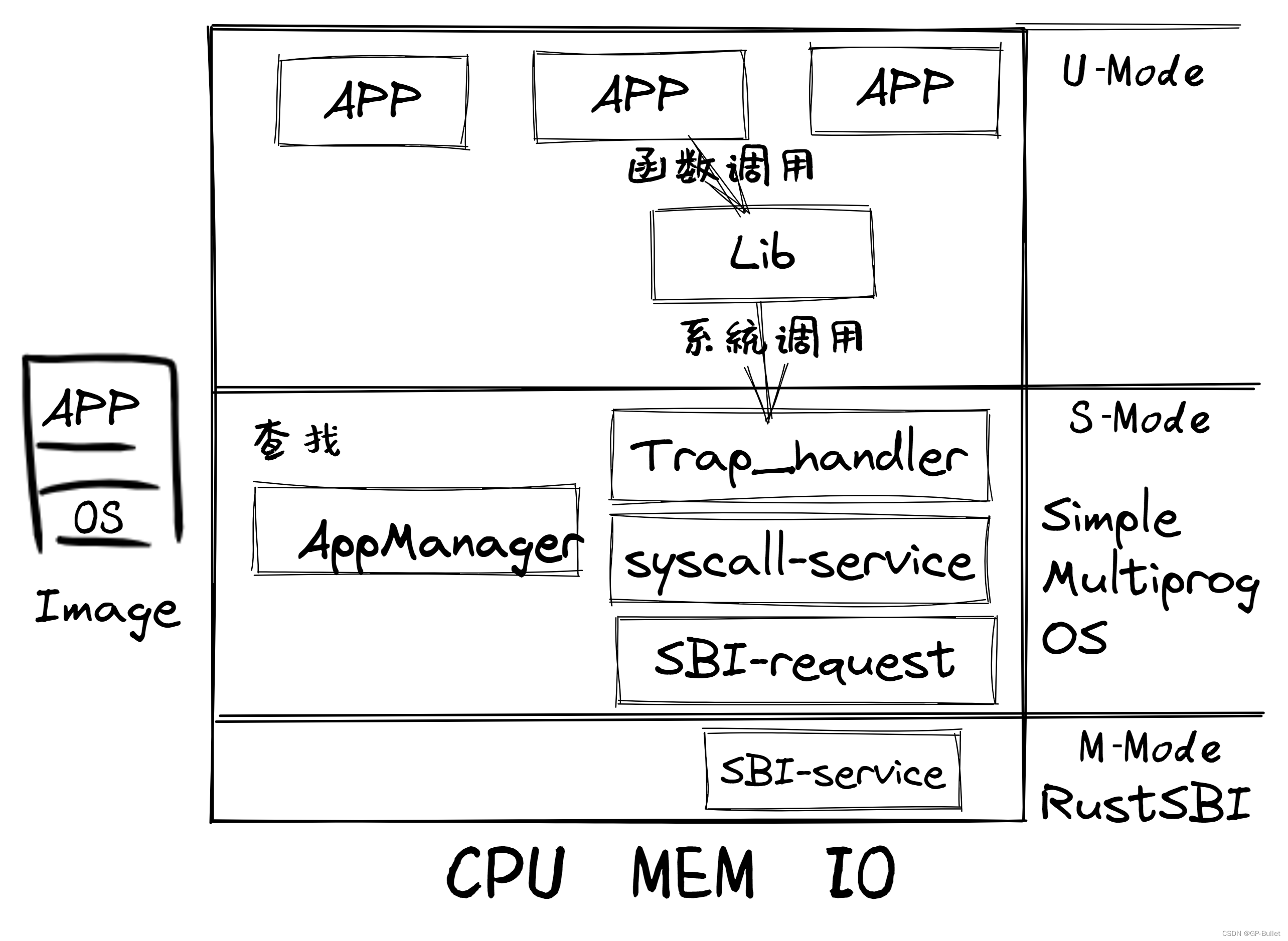
通过上图,大致可以看出Qemu把包含多个app的列表和MultiprogOS的image镜像加载到内存中,RustSBI(bootloader)完成基本的硬件初始化后,跳转到MultiprogOS起始位置,MultiprogOS首先进行正常运行前的初始化工作,即建立栈空间和清零bss段,然后通过改进的 AppManager 内核模块从app列表中把所有app都加载到内存中,并按指定顺序让app在用户态一个接一个地执行。app在执行过程中,会通过系统调用的方式得到MultiprogOS提供的OS服务,如输出字符串等。
协作式多道程序操作系统 – CoopOS的总体结构:
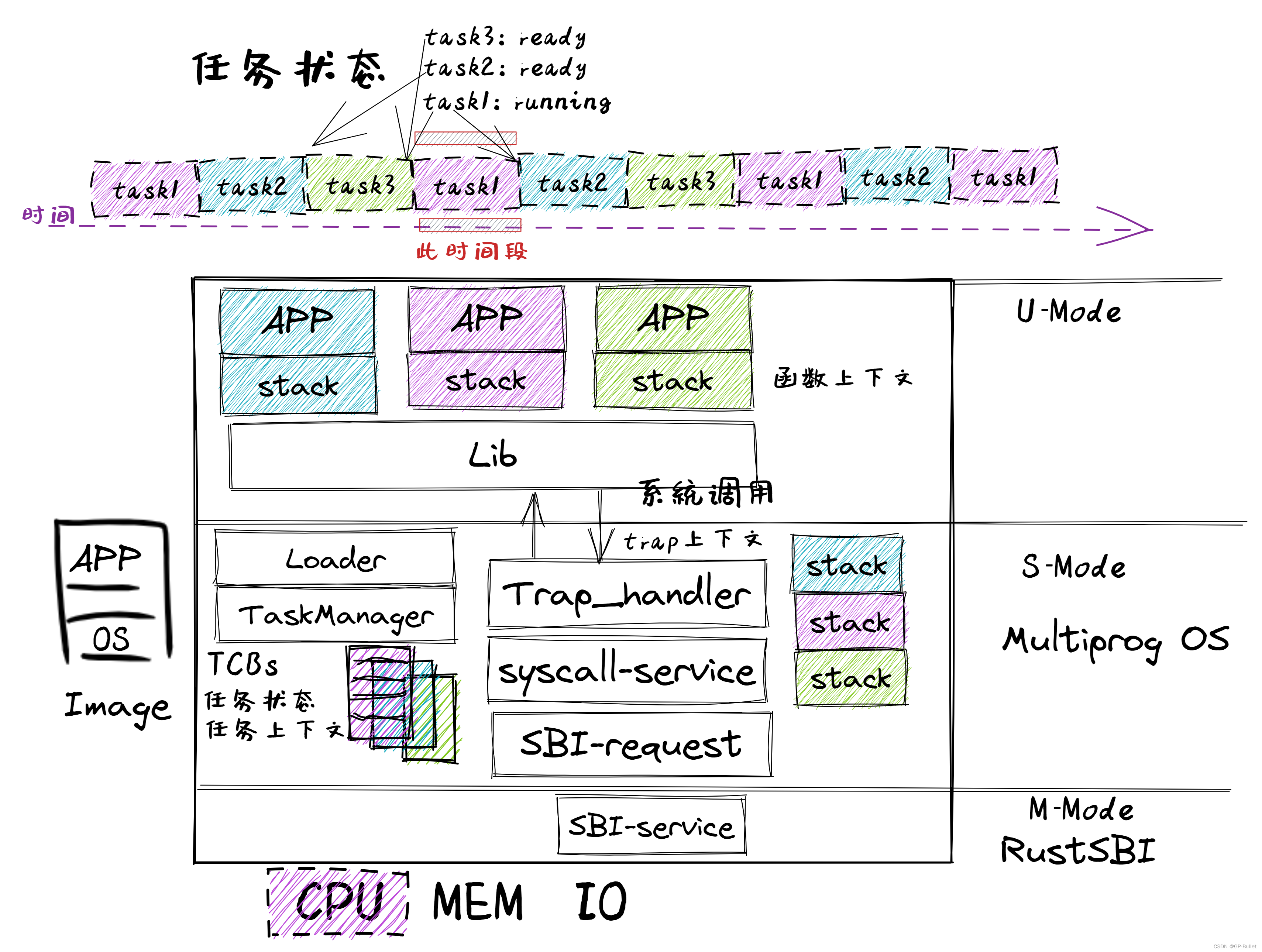
CoopOS进一步改进了 AppManager 内核模块,把它拆分为负责加载应用的 Loader 内核模块和管理应用运行过程的 TaskManager 内核模块。
TaskManager 通过 task 任务控制块来管理应用程序的执行过程,支持应用程序主动放弃 CPU 并切换到另一个应用继续执行,从而提高系统整体执行效率。应用程序在运行时有自己所在的内存空间和栈,确保被切换时相关信息不会被其他应用破坏。如果当前应用程序正在运行,则该应用对应的任务处于运行(Running)状态;如果该应用主动放弃处理器,则该应用对应的任务处于就绪(Ready)状态。操作系统进行任务切换时,需要把要暂停任务的上下文(即任务用到的通用寄存器)保存起来,把要继续执行的任务的上下文恢复为暂停前的内容,这样就能让不同的应用协同使用处理器了。
分时多任务操作系统 – TimesharingOS的总体结构:
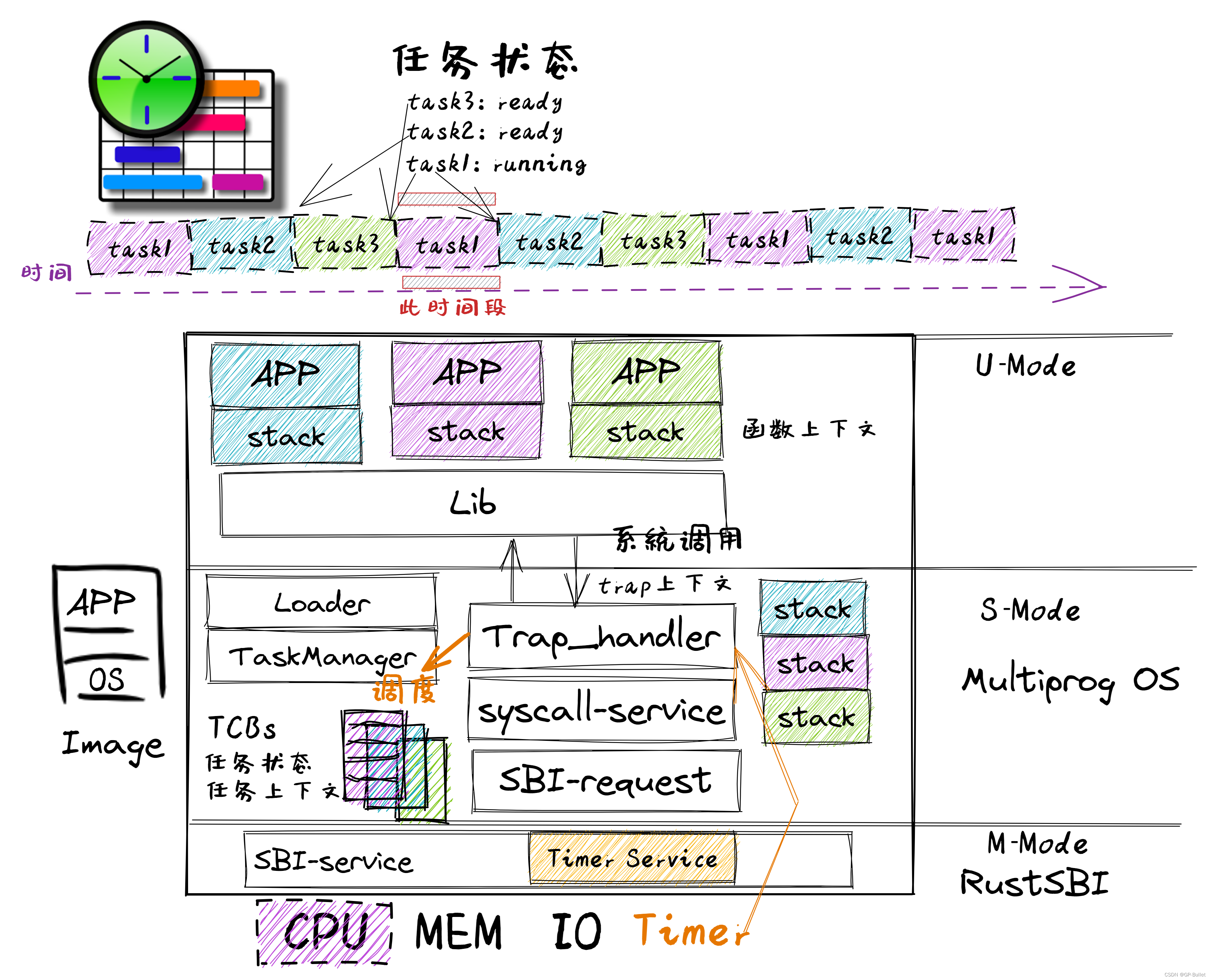
TimesharingOS最大的变化是改进了 Trap_handler 内核模块,支持时钟中断,从而可以抢占应用的执行。并通过进一步改进 TaskManager 内核模块,提供任务调度功能,这样可以在收到时钟中断后统计任务的使用时间片,如果任务的时间片用完后,则切换任务。从而可以公平和高效地分时执行多个应用,提高系统的整体效率。
多道程序放置与加载
- 多道程序放置
多个应用同时放在内存中,所以他们的起始地址是不同的,且地址范围不能重叠
由于每个应用被加载到的位置都不同,也就导致它们的链接脚本 linker.ld 中的 BASE_ADDRESS 都是不同的。不用直接 cargo build 构建应用的链接脚本,而是写一个脚本定制工具 build.py ,为每个应用定制了各自的链接脚本。 - 多道程序加载
所有的应用在内核初始化的时候就一并被加载到内存中。为了避免覆盖,它们自然需要被加载到不同的物理地址。这是通过调用 loader 子模块的 load_apps 函数实现的
任务切换
为了提高效率,我们需要引入新的操作系统概念 任务 、 任务切换 、任务上下文 。
任务切换支持的场景是:一个应用在运行途中便会主动或被动交出 CPU 的使用权,此时它只能暂停执行,等到内核重新给它分配处理器资源之后才能恢复并继续执行
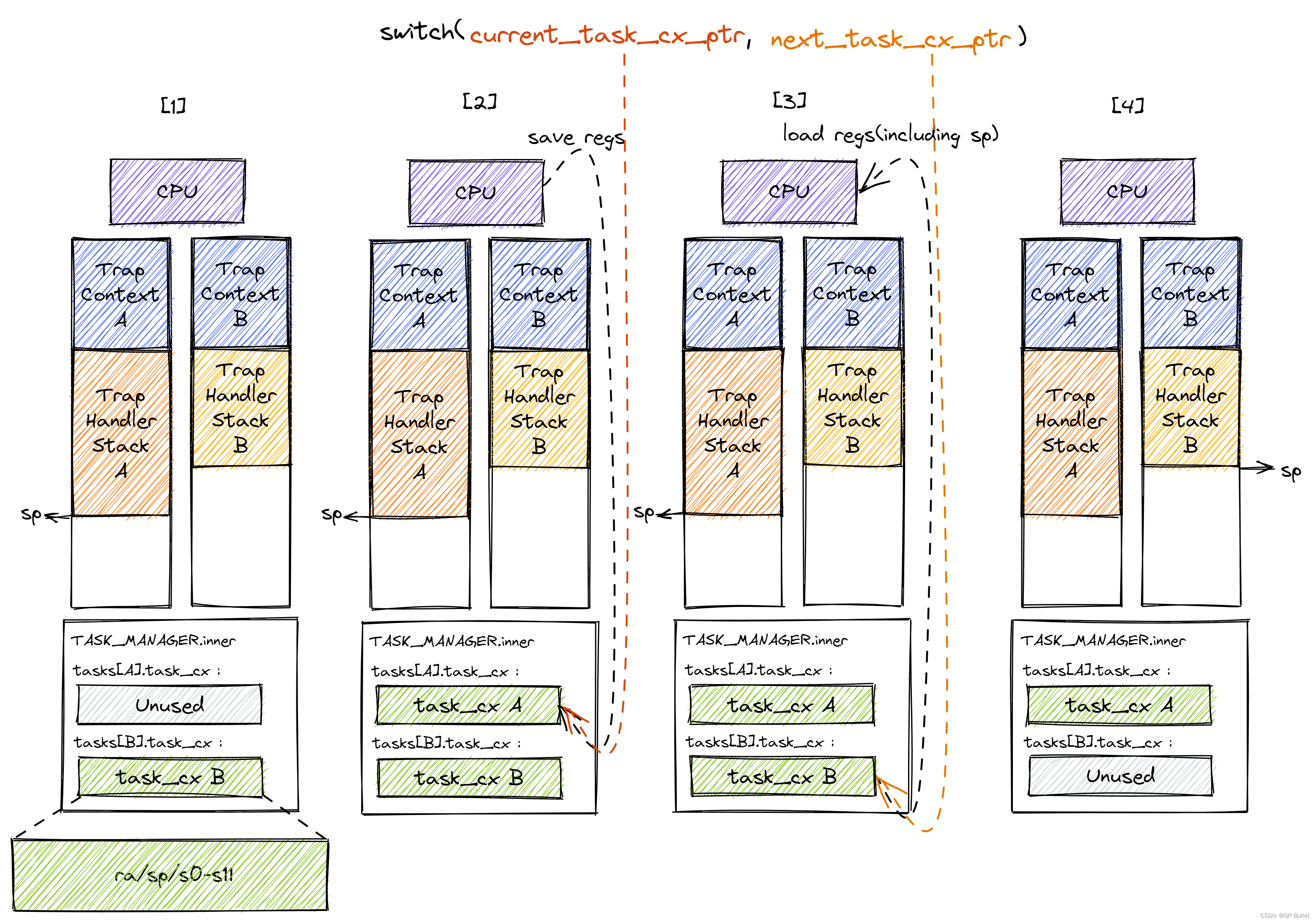
- __switch 函数
调用 __switch 之后直到它返回前的这段时间,原 Trap 控制流 A 会先被暂停并被切换出去, CPU 转而运行另一个应用在内核中的 Trap 控制流 B 。然后在某个合适的时机,原 Trap 控制流 A 才会从某一条 Trap 控制流 C 切换回来继续执行并最终返回。
_switch 函数和一个普通的函数之间的核心差别仅仅是它会 换栈
(当前正在执行的任务的 Trap 控制流,我们用一个名为 current_task_cx_ptr 的变量来保存放置当前任务上下文的地址;而用 next_task_cx_ptr 的变量来保存放置下一个要执行任务的上下文的地址。)
多道程序与协作式调度
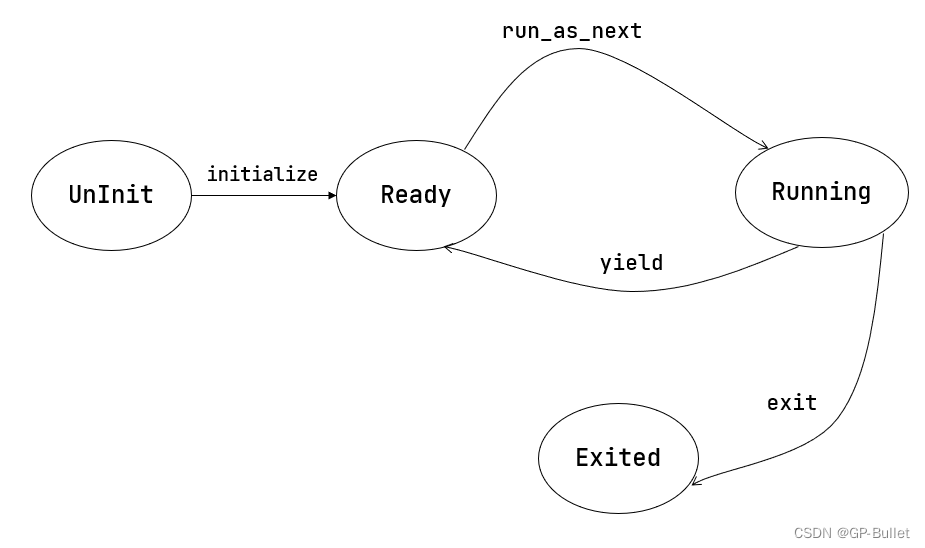
任务运行状态:任务从开始到结束执行过程中所处的不同运行状态:未初始化、准备执行、正在执行、已退出
任务控制块:管理程序的执行过程的任务上下文,控制程序的执行与暂停
任务相关系统调用:应用程序和操作系统直接的接口,用于程序主动暂停 sys_yield 和主动退出 sys_exit。
sys_yield 表示应用自己暂时放弃对CPU的当前使用权,进入 Ready 状态。
sys_exit 表示应用退出执行。
- 任务运行状态、任务控制块
在一段时间内,内核需要管理多个未完成的应用,而且我们不能对应用完成的顺序做任何假定,并不是先加入的应用就一定会先完成。必须在内核中对每个应用分别维护它的运行状态。
任务控制块非常重要,它是内核管理应用的核心数据结构。
// os/src/task/task.rs
#[derive(Copy, Clone, PartialEq)]
pub enum TaskStatus {
UnInit, // 未初始化
Ready, // 准备运行
Running, // 正在运行
Exited, // 已退出
}
// os/src/task/task.rs
#[derive(Copy, Clone)]
pub struct TaskControlBlock {
pub task_status: TaskStatus,
pub task_cx: TaskContext,
}
- 任务管理器
// os/src/task/mod.rs
pub struct TaskManager {
num_app: usize,
inner: UPSafeCell<TaskManagerInner>,
}
struct TaskManagerInner {
tasks: [TaskControlBlock; MAX_APP_NUM],
current_task: usize,
}
运行状态变化图:
分时多任务系统与抢占式调度
- 分时多任务:操作系统管理每个应用程序,以时间片为单位来分时占用处理器运行应用。
- 时间片轮转调度:操作系统在一个程序用完其时间片后,就抢占当前程序并调用下一个程序执行,周而复始,形成对应用程序在任务级别上的时间片轮转调度。维护一个任务队列,每次从队头取出一个应用执行一个时间片,然后把它丢到队尾,再继续从队头取出一个应用,以此类推直到所有的应用执行完毕。
- 时钟中断与计时器
操作系统的计时功能是依靠硬件提供的时钟中断来实现的。
在 RISC-V 64 架构上,该计数器保存在一个 64 位的 CSR mtime 中,我们无需担心它的溢出问题,在内核运行全程可以认为它是一直递增的。
一旦计数器 mtime 的值超过了 mtimecmp,就会触发一次时钟中断。
计时器的控制:
// os/src/timer.rs
use riscv::register::time;
pub fn get_time() -> usize {
time::read()
}
- 抢占式调度
// os/src/trap/mod.rs
match scause.cause() {
Trap::Interrupt(Interrupt::SupervisorTimer) => {
set_next_trigger();
suspend_current_and_run_next();
}
}
trap_handler 函数下新增一个条件分支跳转,当发现触发了一个 S 特权级时钟中断的时候,首先重新设置一个 10ms 的计时器,然后调用上一小节提到的 suspend_current_and_run_next 函数暂停当前应用并切换到下一个。
参考:rCore-Tutorial文档