背景
我为什么要写这样一篇文章?
网上关于 BigCache 和 FreeCache 的文章很少,自己学习时遇到了很多阻力,幸运的是读了一些时日,终将源码参悟。
我的很多学习资料取之网络,LocalCache 这块的文章很少,所以我也想尽自己的绵薄之力回报于网络,尽可能的帮助到大家。
什么是 LocalCache,go 中常见的 LocalCache 有哪些?
LocalCache 顾名思义,是本地高速缓存,不是分布式的,用于加快获取数据的速度或存储一些重要但不需要持久化数据。
为什么需要 LocalCache?
常见的比如有 Redis 中的热 key 问题。热 key 问题
go 中常见的 LocalCache 有:bigcache、freecache、ccache 等。
BigCache
为什么 BigCache 速度快?
- 使用分片技术,减小锁的竞争,降低延迟(这里的分片 x 必须是 2 的幂次方,可以通过幂运算取余,hash & (x - 1))。
- 忽略高额 GC 开销,对于Go语言中的map, 垃圾回收器会检查 map 中的每一个元素, 如果缓存中包含数百万的缓存对象,垃圾回收器对这些对象的无意义的检查导致不必要的时间开销。Go的开发者优化了垃圾回收时对于map的处理,如果map对象中的key和value不包含指针,那么垃圾回收器就会对它们进行优化,不进行垃圾回收的操作。详细信息请参考:修复说明
存储模块
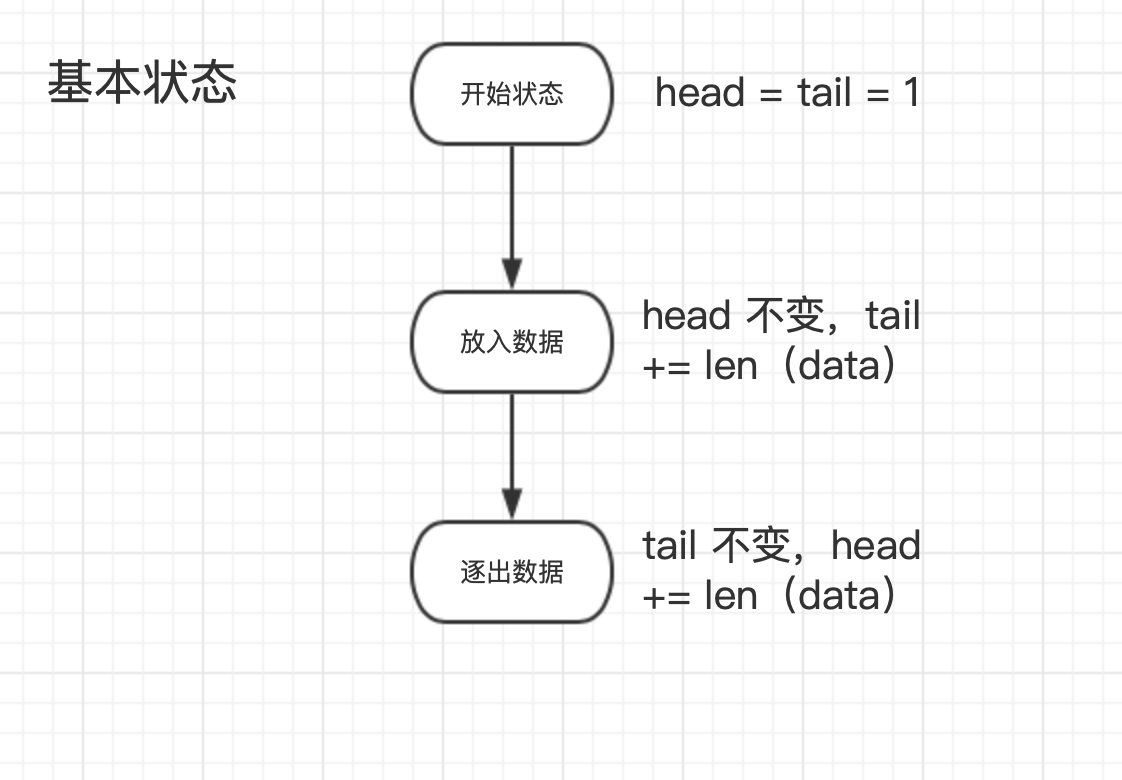
存储模块类似一个可扩容的环形数组。参考请看:link
BytesQueue 结构体
type BytesQueue struct {
array []byte
capacity int
maxCapacity int
head int
tail int
count int
// 右边距
rightMargin int
headerBuffer []byte
verbose bool
initialCapacity int
}
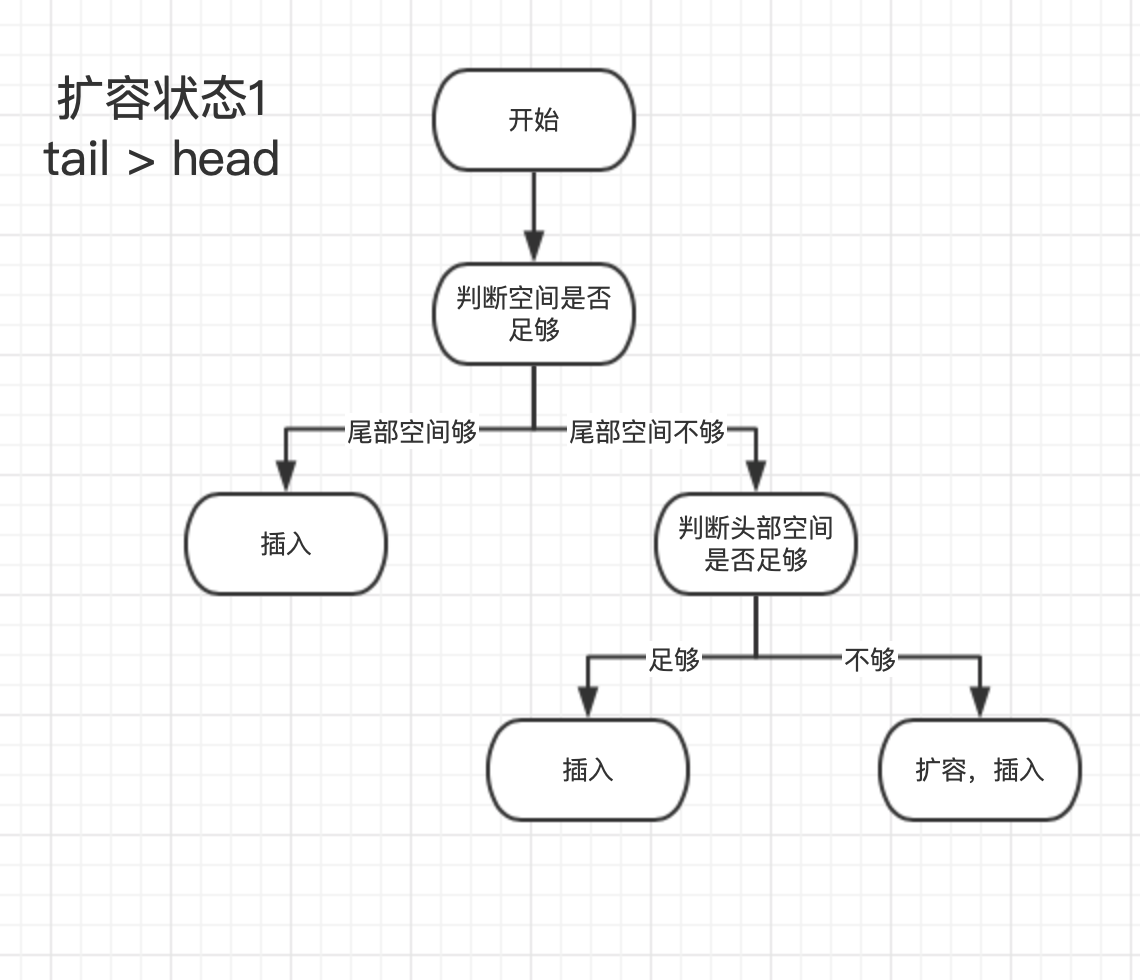
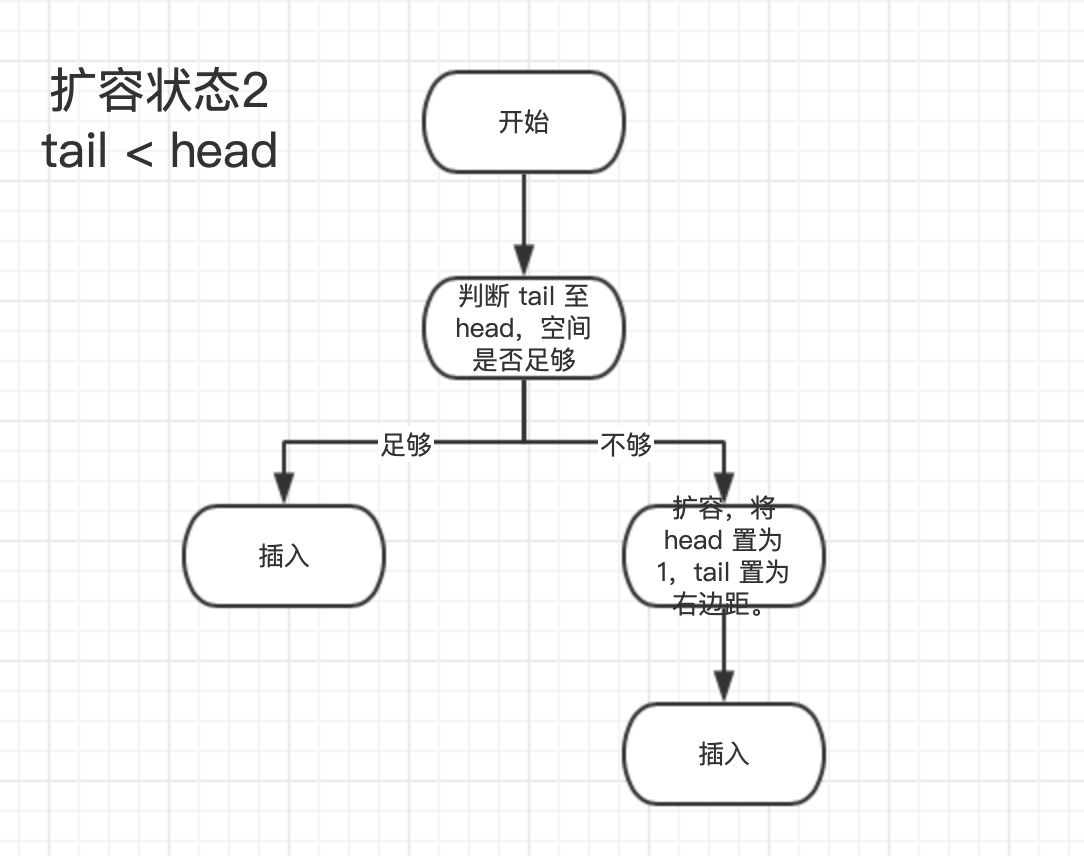
Push 操作
func (q *BytesQueue) Push(data []byte) (int, error) {
dataLen := len(data)
// 判断前后是否有可用空间,没有则扩容。
if q.availableSpaceAfterTail() < dataLen+headerEntrySize {
if q.availableSpaceBeforeHead() >= dataLen+headerEntrySize {
q.tail = leftMarginIndex
} else if q.capacity+headerEntrySize+dataLen >= q.maxCapacity && q.maxCapacity > 0 {
return -1, &queueError{"Full queue. Maximum size limit reached."}
} else {
q.allocateAdditionalMemory(dataLen + headerEntrySize)
}
}
index := q.tail
q.push(data, dataLen)
return index, nil
}
Pop 操作
func (q *BytesQueue) Pop() ([]byte, error) {
data, size, err := q.peek(q.head)
if err != nil {
return nil, err
}
q.head += headerEntrySize + size
q.count--
if q.head == q.rightMargin {
q.head = leftMarginIndex
if q.tail == q.rightMargin {
q.tail = leftMarginIndex
}
q.rightMargin = q.tail
}
return data, nil
}
插入模块
func (s *cacheShard) set(key string, hashedKey uint64, entry []byte) error {
currentTimestamp := uint64(s.clock.epoch())
s.lock.Lock()
// 可以改进
if previousIndex := s.hashmap[hashedKey]; previousIndex != 0 {
if previousEntry, err := s.entries.Get(int(previousIndex)); err == nil {
resetKeyFromEntry(previousEntry)
}
}
if oldestEntry, err := s.entries.Peek(); err == nil {
s.onEvict(oldestEntry, currentTimestamp, s.removeOldestEntry)
}
w := wrapEntry(currentTimestamp, hashedKey, key, entry, &s.entryBuffer)
for {
if index, err := s.entries.Push(w); err == nil {
s.hashmap[hashedKey] = uint32(index)
s.lock.Unlock()
return nil
}
if s.removeOldestEntry(NoSpace) != nil {
s.lock.Unlock()
return fmt.Errorf("entry is bigger than max shard size")
}
}
}
删除模块
共有五钟删除操作。
第一种:set 后若 hashkey 中有值,则执行删除操作(软删除,不改变底层数据)。
if previousIndex := s.hashmap[hashedKey]; previousIndex != 0 {
if previousEntry, err := s.entries.Get(int(previousIndex)); err == nil {
resetKeyFromEntry(previousEntry)
}
}
第二种:set 后调用 onEvict,若头部的数据超时,硬删除。
if oldestEntry, err := s.entries.Peek(); err == nil {
s.onEvict(oldestEntry, currentTimestamp, s.removeOldestEntry)
}
第三种:调用 shard.go 中的 del,同理,也是软删除。
delete(s.hashmap, hashedKey)
s.onRemove(wrappedEntry, Deleted)
if s.statsEnabled {
delete(s.hashmapStats, hashedKey)
}
resetKeyFromEntry(wrappedEntry)
第四种:定时删除,此删除方式是硬删除。详细流程请看:link
if config.CleanWindow > 0 {
go func() {
ticker := time.NewTicker(config.CleanWindow)
defer ticker.Stop()
for {
select {
case t := <-ticker.C:
cache.cleanUp(uint64(t.Unix()))
case <-cache.close:
return
}
}
}()
}
第五种:这一种删除方式一般不会被调用,故放在最后,是硬删除。这种删除方式不会在意是不是超时,而是会直接删除原有数据。
for {
if index, err := s.entries.Push(w); err == nil {
s.hashmap[hashedKey] = uint32(index)
s.lock.Unlock()
return nil
}
if s.removeOldestEntry(NoSpace) != nil {
s.lock.Unlock()
return fmt.Errorf("entry is bigger than max shard size")
}
}
FreeCache
为什么 FreeCache 速度快
- 和 bigcache 一样,使用分片技术,但是分片数量固定,为 256 个。
- 忽略高额 GC 开销,和 bigcache 类似,但是由于 freecache 实现早,没有 map 的优化方案,故 freecache 需要基于切片的映射(耗时长),才能将 hashkey 转换到相对应的 entryPtr 上。
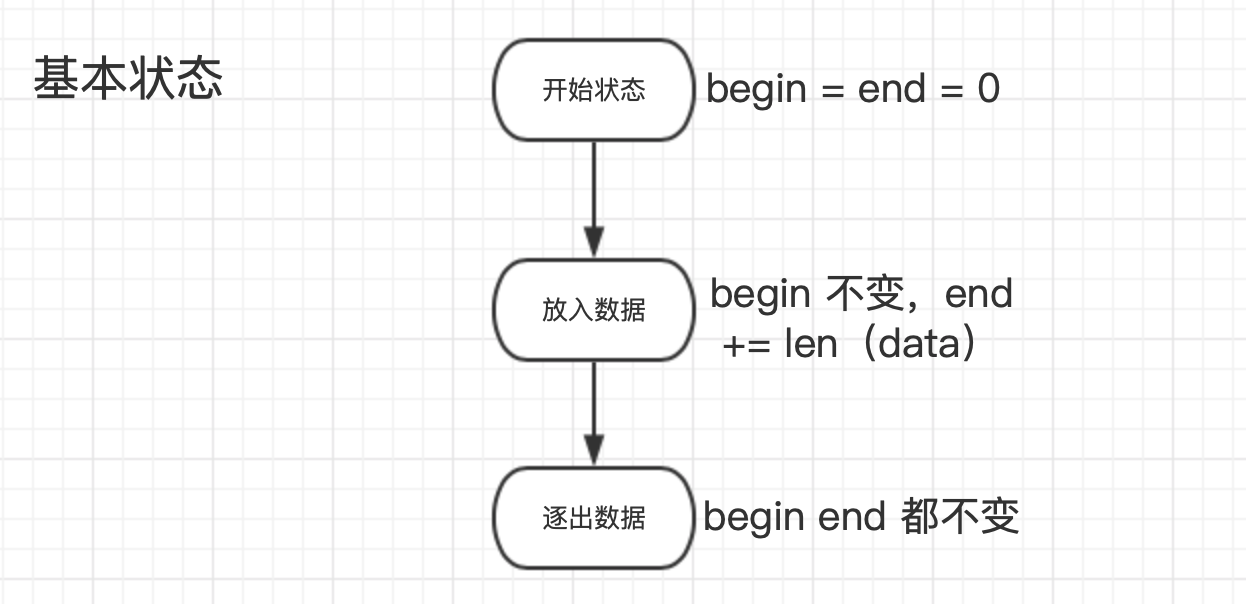
存储模块
存储模块是一个环形数组,不可扩容(这就是 freecache 使用比 bigcache 相对少的原因)。
近似 LRU 算法
这是 freecache 中的精髓算法,将最久未使用的、超时等数据删除。
func (seg *segment) evacuate(entryLen int64, slotId uint8, now uint32) (slotModified bool) {
var oldHdrBuf [ENTRY_HDR_SIZE]byte
consecutiveEvacuate := 0
for seg.vacuumLen < entryLen {
oldOff := seg.rb.End() + seg.vacuumLen - seg.rb.Size()
seg.rb.ReadAt(oldHdrBuf[:], oldOff)
oldHdr := (*entryHdr)(unsafe.Pointer(&oldHdrBuf[0]))
oldEntryLen := ENTRY_HDR_SIZE + int64(oldHdr.keyLen) + int64(oldHdr.valCap)
if oldHdr.deleted {
consecutiveEvacuate = 0
atomic.AddInt64(&seg.totalTime, -int64(oldHdr.accessTime))
atomic.AddInt64(&seg.totalCount, -1)
seg.vacuumLen += oldEntryLen
continue
}
expired := oldHdr.expireAt != 0 && oldHdr.expireAt < now
// 使用的是近似的 lru 算法,当 accessTime * totalCount < totalTime 时,为 true
leastRecentUsed := int64(oldHdr.accessTime)*atomic.LoadInt64(&seg.totalCount) <= atomic.LoadInt64(&seg.totalTime)
if expired || leastRecentUsed || consecutiveEvacuate > 5 {
seg.delEntryPtrByOffset(oldHdr.slotId, oldHdr.hash16, oldOff)
if oldHdr.slotId == slotId {
slotModified = true
}
consecutiveEvacuate = 0
atomic.AddInt64(&seg.totalTime, -int64(oldHdr.accessTime))
atomic.AddInt64(&seg.totalCount, -1)
seg.vacuumLen += oldEntryLen
if expired {
atomic.AddInt64(&seg.totalExpired, 1)
}
} else {
// 撤离最近访问过的旧条目,以提高缓存命中率。
// evacuate an old entry that has been accessed recently for better cache hit rate.
// newOff 是这个的偏移量而已。
newOff := seg.rb.Evacuate(oldOff, int(oldEntryLen))
seg.updateEntryPtr(oldHdr.slotId, oldHdr.hash16, oldOff, newOff)
consecutiveEvacuate++
atomic.AddInt64(&seg.totalEvacuate, 1)
}
}
return
}
插入操作
func (seg *segment) set(key, value []byte, hashVal uint64, expireSeconds int) (err error) {
if len(key) > 65535 {
return ErrLargeKey
}
// fmt.Println("seg.vacuumLen is:", seg.vacuumLen)
maxKeyValLen := len(seg.rb.data)/4 - ENTRY_HDR_SIZE
if len(key)+len(value) > maxKeyValLen {
// Do not accept large entry.
// unix.Exit(0)
return ErrLargeEntry
}
now := seg.timer.Now()
expireAt := uint32(0)
if expireSeconds > 0 {
expireAt = now + uint32(expireSeconds)
}
slotId := uint8(hashVal >> 8)
hash16 := uint16(hashVal >> 16)
var hdrBuf [ENTRY_HDR_SIZE]byte
hdr := (*entryHdr)(unsafe.Pointer(&hdrBuf[0]))
slot := seg.getSlot(slotId)
idx, match := seg.lookup(slot, hash16, key)
// fmt.Println(match)
if match {
matchedPtr := &slot[idx]
seg.rb.ReadAt(hdrBuf[:], matchedPtr.offset)
hdr.slotId = slotId
hdr.hash16 = hash16
hdr.keyLen = uint16(len(key))
originAccessTime := hdr.accessTime
hdr.accessTime = now
hdr.expireAt = expireAt
hdr.valLen = uint32(len(value))
if hdr.valCap >= hdr.valLen {
//in place overwrite 覆盖
atomic.AddInt64(&seg.totalTime, int64(hdr.accessTime)-int64(originAccessTime))
seg.rb.WriteAt(hdrBuf[:], matchedPtr.offset)
seg.rb.WriteAt(value, matchedPtr.offset+ENTRY_HDR_SIZE+int64(hdr.keyLen))
atomic.AddInt64(&seg.overwrites, 1)
return
}
// avoid unnecessary memory copy.
seg.delEntryPtr(slotId, slot, idx)
match = false
// increase capacity and limit entry len.
for hdr.valCap < hdr.valLen {
hdr.valCap *= 2
}
if hdr.valCap > uint32(maxKeyValLen-len(key)) {
hdr.valCap = uint32(maxKeyValLen - len(key))
}
} else {
hdr.slotId = slotId
hdr.hash16 = hash16
hdr.keyLen = uint16(len(key))
hdr.accessTime = now
hdr.expireAt = expireAt
hdr.valLen = uint32(len(value))
hdr.valCap = uint32(len(value))
if hdr.valCap == 0 { // avoid infinite loop when increasing capacity.
hdr.valCap = 1
}
}
// 判断长度,如果空间不够就删除
entryLen := ENTRY_HDR_SIZE + int64(len(key)) + int64(hdr.valCap)
slotModified := seg.evacuate(entryLen, slotId, now)
// fmt.Println(slotModified)
if slotModified {
// the slot has been modified during evacuation, we need to looked up for the 'idx' again.
// otherwise there would be index out of bound error.
slot = seg.getSlot(slotId)
idx, match = seg.lookup(slot, hash16, key)
// assert(match == false)
}
newOff := seg.rb.End()
fmt.Println(newOff)
seg.insertEntryPtr(slotId, hash16, newOff, idx, hdr.keyLen)
seg.rb.Write(hdrBuf[:])
seg.rb.Write(key)
seg.rb.Write(value)
seg.rb.Skip(int64(hdr.valCap - hdr.valLen))
atomic.AddInt64(&seg.totalTime, int64(now))
atomic.AddInt64(&seg.totalCount, 1)
seg.vacuumLen -= entryLen
return
}
删除操作
共有三钟删除操作。
第一种:set 后若 hashkey 中有值,len(oldData) < len(newData)则执行覆盖操作。
if hdr.valCap >= hdr.valLen {
//in place overwrite 覆盖
atomic.AddInt64(&seg.totalTime, int64(hdr.accessTime)-int64(originAccessTime))
seg.rb.WriteAt(hdrBuf[:], matchedPtr.offset)
seg.rb.WriteAt(value, matchedPtr.offset+ENTRY_HDR_SIZE+int64(hdr.keyLen))
atomic.AddInt64(&seg.overwrites, 1)
return
}
第二种:set 后若 hashkey 中有值,len(oldData) > len(newData)则执行软删除操作。
func (seg *segment) delEntryPtr(slotId uint8, slot []entryPtr, idx int) {
offset := slot[idx].offset
var entryHdrBuf [ENTRY_HDR_SIZE]byte
seg.rb.ReadAt(entryHdrBuf[:], offset)
entryHdr := (*entryHdr)(unsafe.Pointer(&entryHdrBuf[0]))
entryHdr.deleted = true
seg.rb.WriteAt(entryHdrBuf[:], offset)
// 将这个 entry 的 slot 覆盖
copy(slot[idx:], slot[idx+1:])
seg.slotLens[slotId]--
atomic.AddInt64(&seg.entryCount, -1)
}
第三种:LRU 删除,类似于 bigcache 的 Pop,将头部的删除(如果头部可用,移后即可),留出空间。
比较 bigcache 和 freecache
bigcache 的 readme.md 写的比较详细了:link
因为 bigcache 的效率高,故一般建议使用 bigcache。
参考链接
https://github.com/allegro/bigcache
https://colobu.com/2019/11/18/how-is-the-bigcache-is-fast
https://github.com/coocood/freecache
https://www.jianshu.com/p/67d8c8511e8e
https://neojos.com/blog/2018/2018-08-19-%E6%9C%AC%E5%9C%B0%E7%BC%93%E5%AD%98bigcache/