此篇博客主要就图的储存结构——邻接表展开。
邻接表
图的一种最便于理解的储存结构就是邻接矩阵了(可以简单的把它视为一个二维数组),但是邻接矩阵在处理边数较少,但顶点较多的情况时会浪费不少的储存空间。因此便有了邻接表这种储存结构。
- 图中顶点用一个一维数组存储, 当然,顶点也可以用单链表来存储,不过数组可以较容易地读取顶点信息,更加方便。另外,对于顶点数组中,每个数据元素还需要存储指向第一个邻接点的指针,以便于查找该顶点的边信息。
- 图中每个顶点 Vi 的所有邻接点构成一个线性表,由于邻接点的个数不定,所以用单链表存储,无向图称为顶点 Vi 的边表,有向图则称为顶点 Vi 作为弧尾的出边表。
如下图:
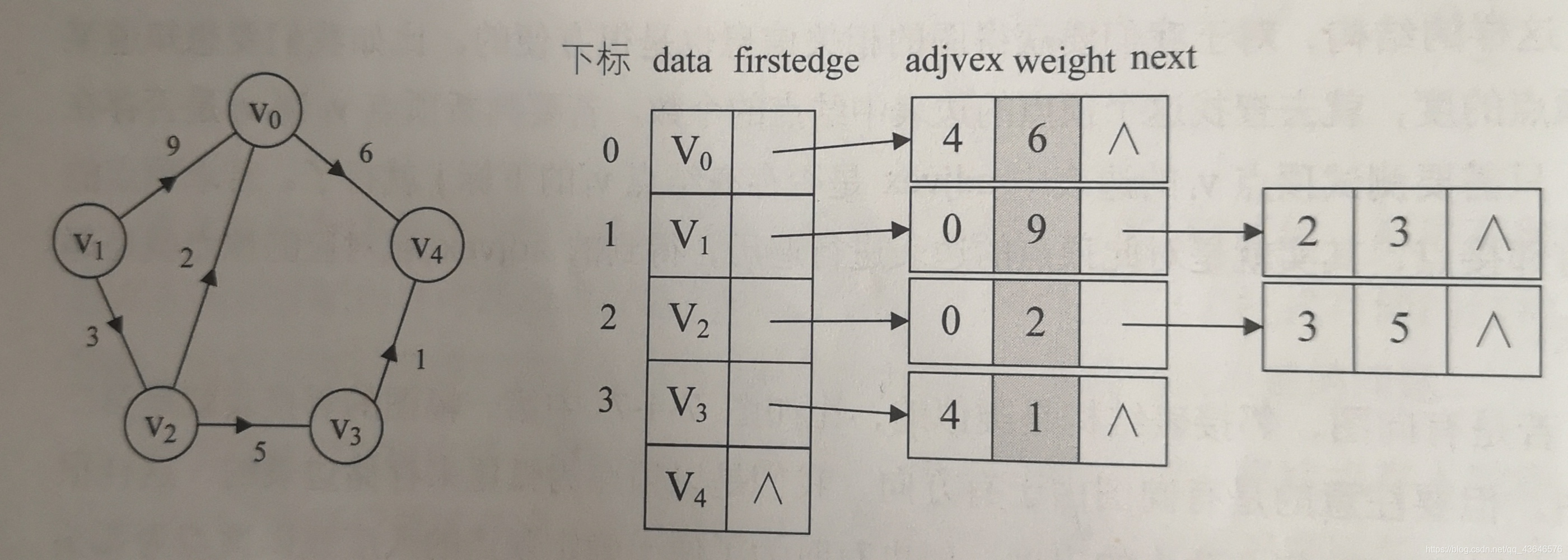 根据上图,再来看相关结点的定义就比较好理解了。
根据上图,再来看相关结点的定义就比较好理解了。
//边表结点
typedef struct EdgeNode
{
int adjvex; //邻接点域,储存顶点对应的下标
//int weight; //权值
struct EdgeNode *next;
}EdgeNode;
//顶点表结点
typedef struct VertexNode
{
int data; //储存顶点信息
EdgeNode *firstedge; //边表头结点
}VertexNode, AdjList[MAXVEX];
typedef struct
{
AdjList adjList;
int vernum, edgenum; //当前顶点数,结点数
}Graph;
下来再让我们一起来看一下如何建立邻接表(无向图)。
//建立邻接表
void CreatALGraph(Graph *G)
{
int i, j, k, w;
EdgeNode *e;
printf("输入顶点数和边数:");
scanf("%d %d", &G->vernum, &G->edgenum);
//建立顶点表
printf("输入顶点:");
for(i = 0; i < G->vernum; ++i)
{
scanf("%d", &G->adjList[i].data);
G->adjList[i].firstedge = NULL;
}
//建立边表
for(k = 0; k < G->edgenum; ++k)
{
printf("输入边上的顶点序号:");
scanf("%d %d", &i, &j);
//无向图,两次插入(头插法)
e = (EdgeNode *)malloc(sizeof(EdgeNode));
e->adjvex = j;
//e->weight = w;
e->next = G->adjList[i].firstedge; //将e指向当前顶点指向的结点
G->adjList[i].firstedge = e; //将当前顶点指向e
e = (EdgeNode *)malloc(sizeof(EdgeNode));
e->adjvex = i;
//e->weight = w;
e->next = G->adjList[j].firstedge; //将e指向当前顶点指向的结点
G->adjList[j].firstedge = e; //将当前顶点指向e
}
}
图的遍历
从图中某一顶点出发访问图中其余顶点,且使每一个顶点仅能被访问一次,这个过程就叫做图的遍历。
深度优先遍历
简单理解,就是一条路走到黑,不撞南墙不回头???? 。
如下图,给定一个迷宫,要求从顶点 A 出发,访问其余所有顶点。
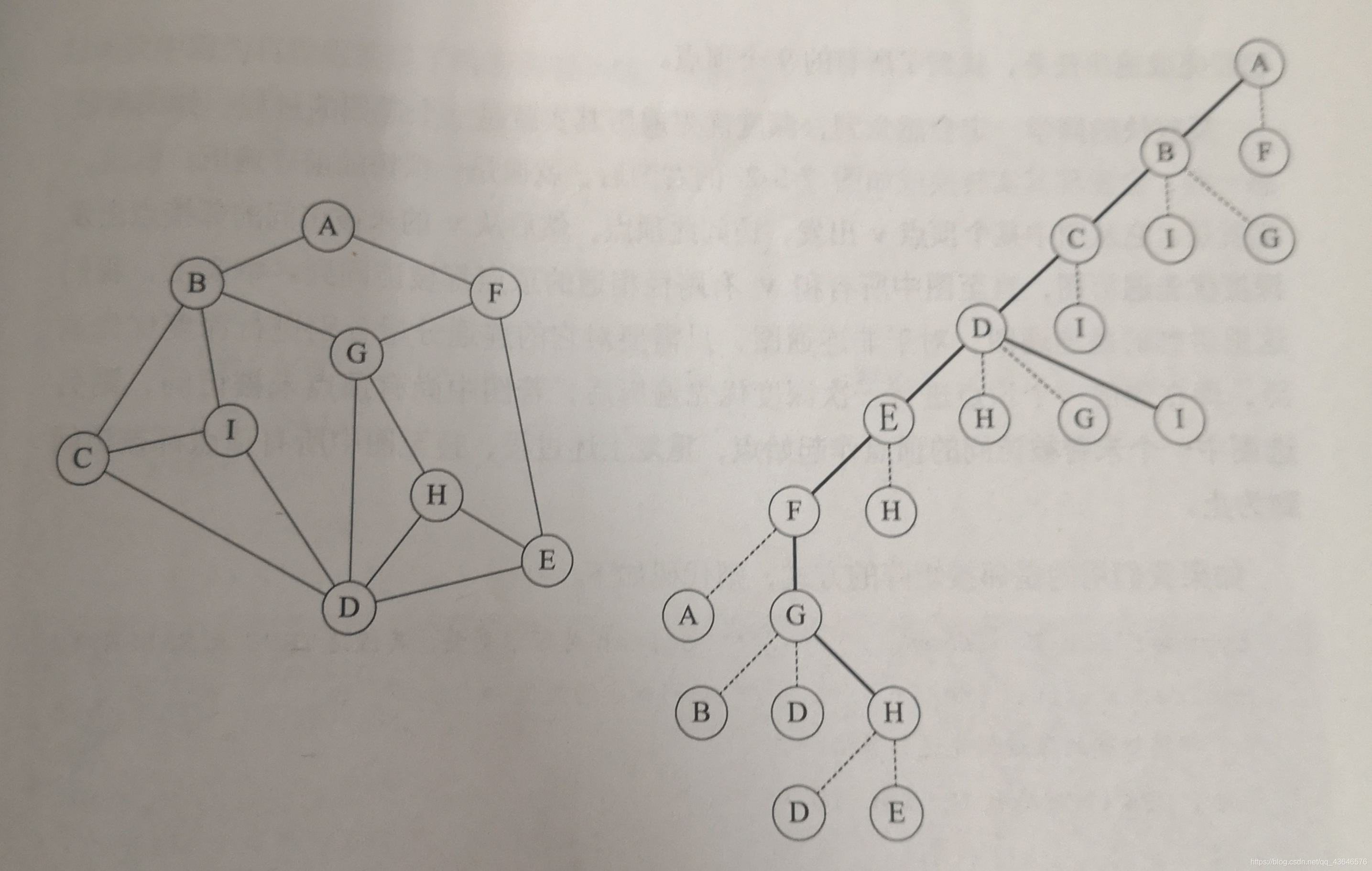 加深的黑线便是我们所走过的路程(默认开始走右边的路径),当遇到重复顶点时便会回溯(撞到墙????)。
加深的黑线便是我们所走过的路程(默认开始走右边的路径),当遇到重复顶点时便会回溯(撞到墙????)。
可以看出,转化为右图后,就相当于一个树的前序遍历。
结论:
从图中某个顶点 V 出发,访问此顶点,然后从 V 的未被访问的邻接点出发深度优先遍历图,直至图中所有和 V 相通的顶点都被访问到。若图中尚有顶点未被访问(非连通图),则另选图中一个未曾被访问的顶点作起始点,重复上述过程,直至图中所有顶点都被访问到。
//dfs
void dfs(Graph G, int i)
{
book[i] = 1;
printf("%d ", G.adjList[i].data);
EdgeNode *e = G.adjList[i].firstedge;
while(e)
{
if(!book[e->adjvex])
dfs(G, e->adjvex); //对未访问的邻接顶点递归调用
e = e->next;
}
}
void dfsTraverse(Graph G)
{
int i;
for(i = 0; i < G.vernum; ++i)
book[i] = 0;
for(i = 0; i < G.vernum; ++i)
{
if(!book[i]) //未被访问
dfs(G, i);
}
printf("\n");
}
上面是dfs的递归版本,再让我们来看一看非递归的吧
//dfs——非递归
void dfs_(Graph G)
{
memset(book, 0, MAXVEX);
std::stack<int> S;
S.push(0);
while(!S.empty())
{
int n = S.top();
S.pop();
if(!book[n])
{
book[n] = 1;
printf("%d ", G.adjList[n].data);
}
EdgeNode *e = G.adjList[n].firstedge;
while(e)
{
if(!book[e->adjvex])
S.push(e->adjvex);
e = e->next;
}
}
printf("\n");
}
广度优先遍历
bfs 有一种广撒网的意思????
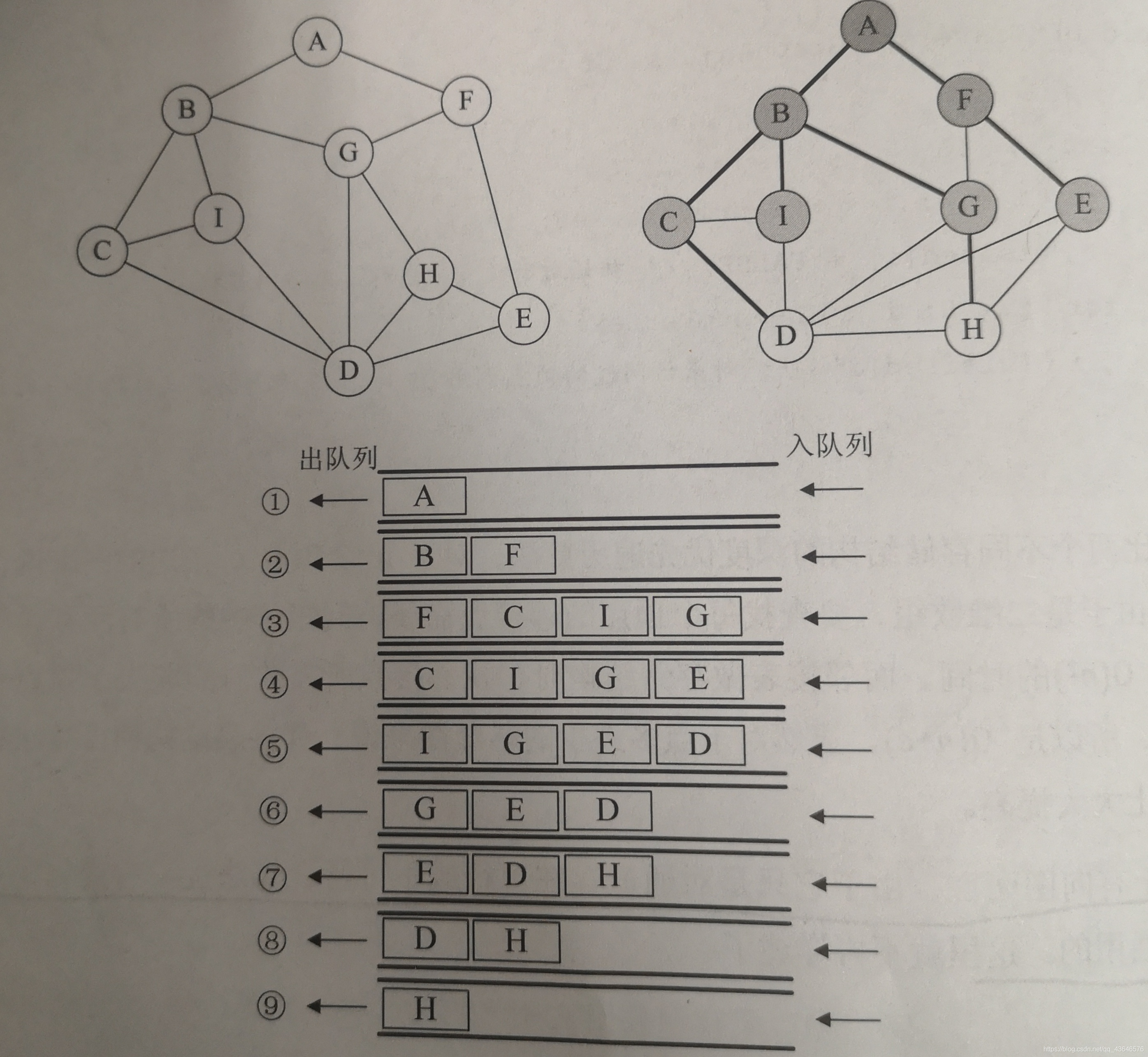 dfs 类似于树的前序遍历,而bfs 就有点类似于层序遍历了。
dfs 类似于树的前序遍历,而bfs 就有点类似于层序遍历了。
结论:
从图中某个顶点 V 出发,访问此顶点,将与其有边且未被访问的顶点都依次入队,按出队顺序依次执行以上步骤。
//bfs
void bfsTraverse(Graph G)
{
int i;
EdgeNode *e;
std::queue<int> Q;
for(i = 0; i < G.vernum; ++i)
book[i] = 0;
for(i = 0; i < G.vernum; ++i)
{
if(!book[i])
{
book[i] = 1;
printf("%d ", G.adjList[i].data);
Q.push(i);
while(!Q.empty())
{
i = Q.front();
Q.pop();
e = G.adjList[i].firstedge; //当前顶点边表头指针
while(e)
{
if(!book[e->adjvex])
{
book[e->adjvex] = 1;
printf("%d ", G.adjList[e->adjvex].data);
Q.push(e->adjvex);
}
e = e->next; //指向下一邻接点
}
}
}
}
printf("\n");
}
补充——销毁边表节点
void DeleteEdge(Graph *G)
{
EdgeNode *e;
for(int i = 0; i < G->vernum; ++i)
{
while(G->adjList[i].firstedge != NULL)
{
e = G->adjList[i].firstedge;
G->adjList[i].firstedge = e->next;
free(e);
}
}
}
深度优先遍历与广度优先遍历在时间复杂度上是一致的,不同之处在与对顶点的访问顺序不同。
深度优先遍历更适合目标比较明确,以找到目标为目地的情况,而广度优先遍历更适合寻找相对最优解。
参考
《数据结构与算法》——王曙燕
《大话数据结构》